- 教員氏名
- 永瀬 純也(ながせ じゅんや) 准教授
- 学位
- 博士(工学)
- 学歴
- 岡山大・院・自然科学
- 専門分野
- ロボット工学、メカトロニクス
- 研究課題(長期)
- 生活支援・災害救助を目的としたロボット・メカトロニクス機器の開発
- 研究課題(短期)
- 表面剛性可変型ロボットハンドの開発、ウォームラック機構に基づく円筒状クローラ型ロボットの開発
龍谷大学 You, Unlimited
Need Help?
Faculty of Advanced Science and Technology
先端理工学部永瀬 純也(ながせ じゅんや)

研究テーマ:バイオロボティクスに基づく人間支援ロボットの開発
現在、日本は超高齢社会に突入しており、それに伴う労働力人口の減少や介護者の増加などの問題に対して,介護やリハビリテーション,および日常の作業支援等を目的とした人間共存型ロボットの活躍が期待されています。また、阪神淡路大震災を機に、災害救助を目的としたレスキューロボットの開発も盛んに行われています。
当研究室では、ヒトの介護・福祉・生活支援および災害救助を目的として、バイオロボティクスに基づいたロボット・メカトロニクス機器の研究・開発を行っています。バイオロボティクスとは、生体工学とロボット工学が融合した新しい学問領域で、当研究室では特に、生物の構造や原理を模倣・応用したロボット・メカトロニクス機器の開発を行っています。
具体的には、空気圧で駆動する軽量で柔軟な人工筋アクチュエータの研究、軽量でヒトの手の柔らかさ・自由度を有するロボットハンドおよび筋電義手の開発、そしてアメーバの移動原理を規範とした円筒状クローラ型レスキューロボットの開発を行っています。
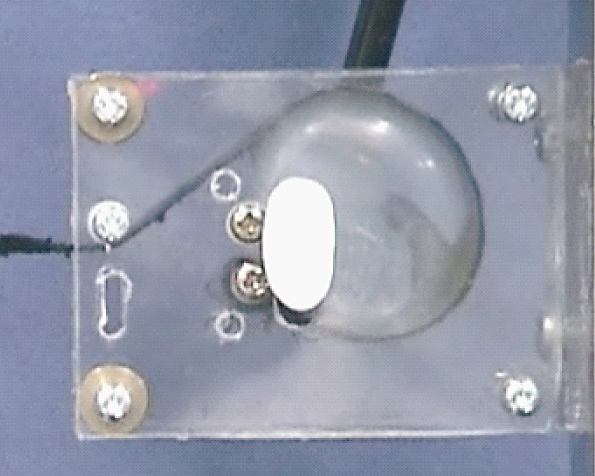
 バルーン型腱駆動アクチュエータ
バルーン型腱駆動アクチュエータ 表面剛性可変型ロボットハンド
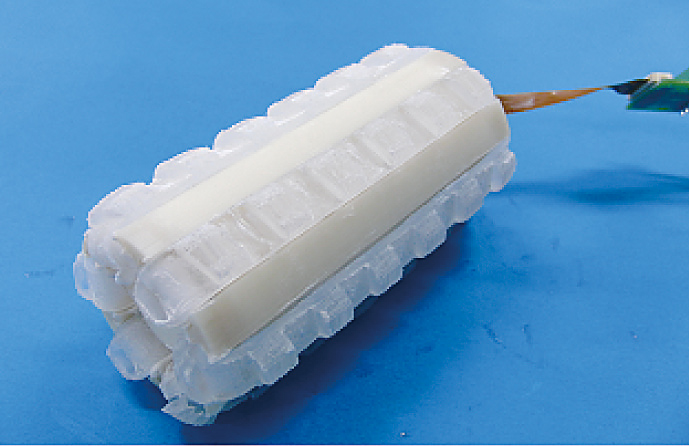
表面剛性可変型ロボットハンド 円筒状クローラ型ロボット
円筒状クローラ型ロボット