- 教員氏名
- 渋谷 恒司(しぶや こうじ) 教授
- 学位
- 博士(工学)
- 学歴
- 早稲田大・院・理工
- 専門分野
- ロボット工学
- 研究課題(長期)
- ロボットによる感性表現の実現、生物型移動ロボットの研究、ソフトロボティクスの研究
- 研究課題(短期)
- バイオリン演奏ロボットの演奏表現の追求、脚型ロボットの安定歩行の研究、柔らかい素材を用いた形態変形する触覚センサの開発
龍谷大学 You, Unlimited
Need Help?
Faculty of Advanced Science and Technology
先端理工学部渋谷 恒司(しぶや こうじ)

研究テーマ:バイオリン演奏ロボットと生物型移動ロボット
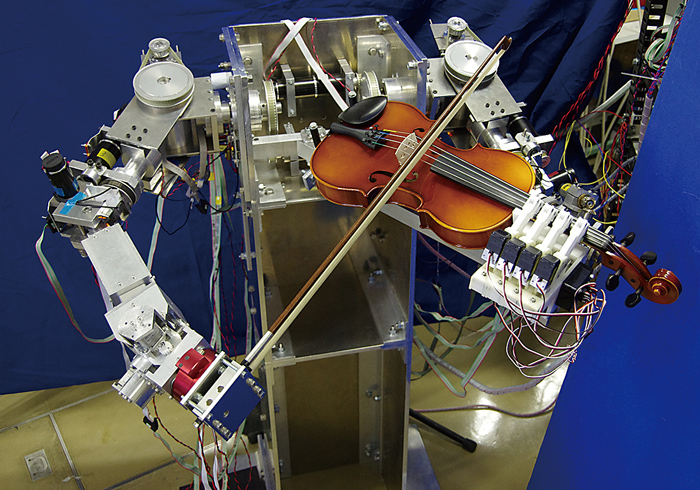
ロボットの動作は、人間と比べあまり感情豊かには感じられません。この1つの大きな要因として、ロボットの感性や感情の表現手法が十分に確立されていないという点が挙げられます。このため、本研究室ではバイオリン演奏を対象として、感性の表現手法を検討することを研究課題としました。感性を代表するものとして「明るい」などの「音色」をとりあげ、望む音色を生成する過程で、音色が運動決定にどのように影響しているかを考察しています。現在、バイオリン演奏が可能なハードウエアの開発を行っており、これを用いて表現力豊かな演奏を実現したいと考えています。
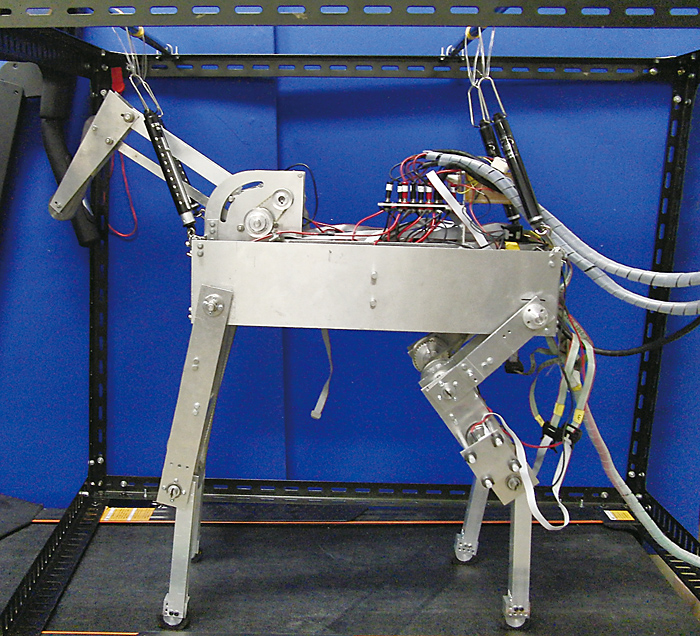
上記テーマと平行して、陸上、水中および空中を対象とした生物型移動ロボットの研究も行っています。生物の形態や機能を模倣した機械システムの開発を通じて、生物の知能を追求したいと考えています。具体的には、まず、頭部を有する4脚走行ロボットを開発中で、頭部動作が歩容に与える影響を調べています。水中ロボットの開発では、マッコウクジラの脳油による浮力調整仮説を参考にした新たな浮力調整装置を開発中です。また、脳波による移動ロボット制御に関する研究も開始しました。さらに、近年注目を集めている柔軟素材を使ったソフトロボットの研究も開始しました。
 バイオリン演奏ロボット
バイオリン演奏ロボット 4脚ロボット
4脚ロボット