- 教員氏名
- 門脇 惇(かどわき じゅん) 講師
- 学位
- 博士(工学)
- 学歴
- 香川大学大学院工学研究科知能機械システム工学専攻博士後期課程修了
- 専門分野
- ロボット工学、メカトロニクス、ソフトロボティクス
- 研究課題(長期)
- ソフトロボティクス・ソフトメカニズムに関する研究
- 研究課題(短期)
- 手繰り動作を実現する空気圧ゴム人工筋、既存装具をパワーアシストロボット化するベルト部分後付け型人工筋、ソフト脚移動ロボット、農作業用パワーアシストロボット
龍谷大学 You, Unlimited
Need Help?
Faculty of Advanced Science and Technology
先端理工学部門脇 惇(かどわき じゅん)

研究テーマ:ソフトロボティクス・ソフトメカニズムに関する研究
ロボットにおける「柔らかさ」の発展と普及は,「人間と自然とロボット」をつなぐ重要な要素となると考えられます.本研究室では,空気圧ソフトアクチュエータを用いたソフトロボットおよび人間支援ロボットの開発,ならびにロボットに用いられる機構・要素技術の研究開発を行っています.これまでに,手繰り動作を実現する空気圧ゴム人工筋や既存装具をパワーアシストロボット化するベルト部分後付け型人工筋を開発し,空気圧ソフトアクチュエータの有する柔軟性とバックドライバビリティを人間支援ロボットへ応用する研究を進めてきました.また,作業空間に応じて移動機構を切り替えることで高速での移動を実現するソフト脚歩行ロボットなど,様々な環境で人間を支援するソフトロボットの研究開発を行ってきました.人間親和性と環境適応性を重視し,人と自然とともにあるロボットの実現を目指していきます.
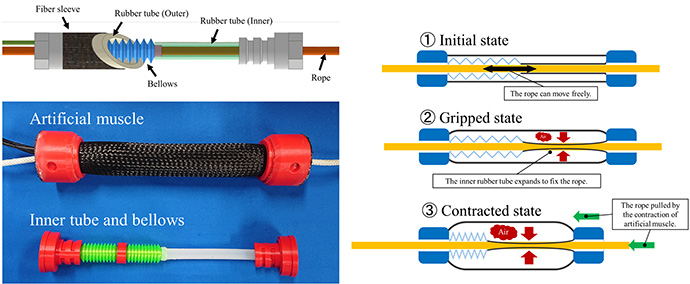
 ロープやベルトを用いて外部に発生力を断続的に伝達可能な手繰り動作を実現する空気圧ゴム人工筋
ロープやベルトを用いて外部に発生力を断続的に伝達可能な手繰り動作を実現する空気圧ゴム人工筋 市販の墜落制止用器具にベルト部分後付け型人工筋を取り付けた状態での装着実験
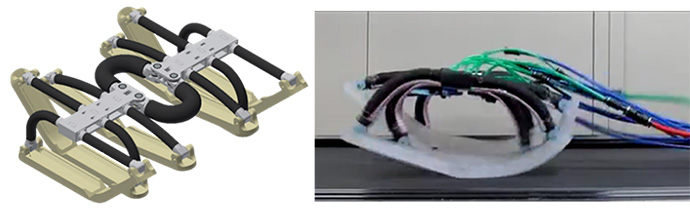
市販の墜落制止用器具にベルト部分後付け型人工筋を取り付けた状態での装着実験 狭隘空間を蠕動運動,広闊空間を脚歩行によって移動するソフト脚移動ロボット
狭隘空間を蠕動運動,広闊空間を脚歩行によって移動するソフト脚移動ロボット