子どもの頃からアニメなどに登場するロボットに興味があり、自分で作ってみたいと考えていました。龍谷大学に入学したのも渋谷恒司教授(機械工学・ロボティクス課程)の下でロボット工学を学びたかったからです。今回のプロジェクトリサーチも迷わずロボットを製作することに決め、課程の友人と二人で取り組みました。制作の第1段階として、世界中で研究開発されているロボットの特徴をリサーチし、それらを参考に二本足で歩行するロボットの製作と安定した歩行の実現を目標として活動しました。
子どもの頃からアニメなどに登場するロボットに興味があり、自分で作ってみたいと考えていました。龍谷大学に入学したのも渋谷恒司教授(機械工学・ロボティクス課程)の下でロボット工学を学びたかったからです。今回のプロジェクトリサーチも迷わずロボットを製作することに決め、課程の友人と二人で取り組みました。制作の第1段階として、世界中で研究開発されているロボットの特徴をリサーチし、それらを参考に二本足で歩行するロボットの製作と安定した歩行の実現を目標として活動しました。
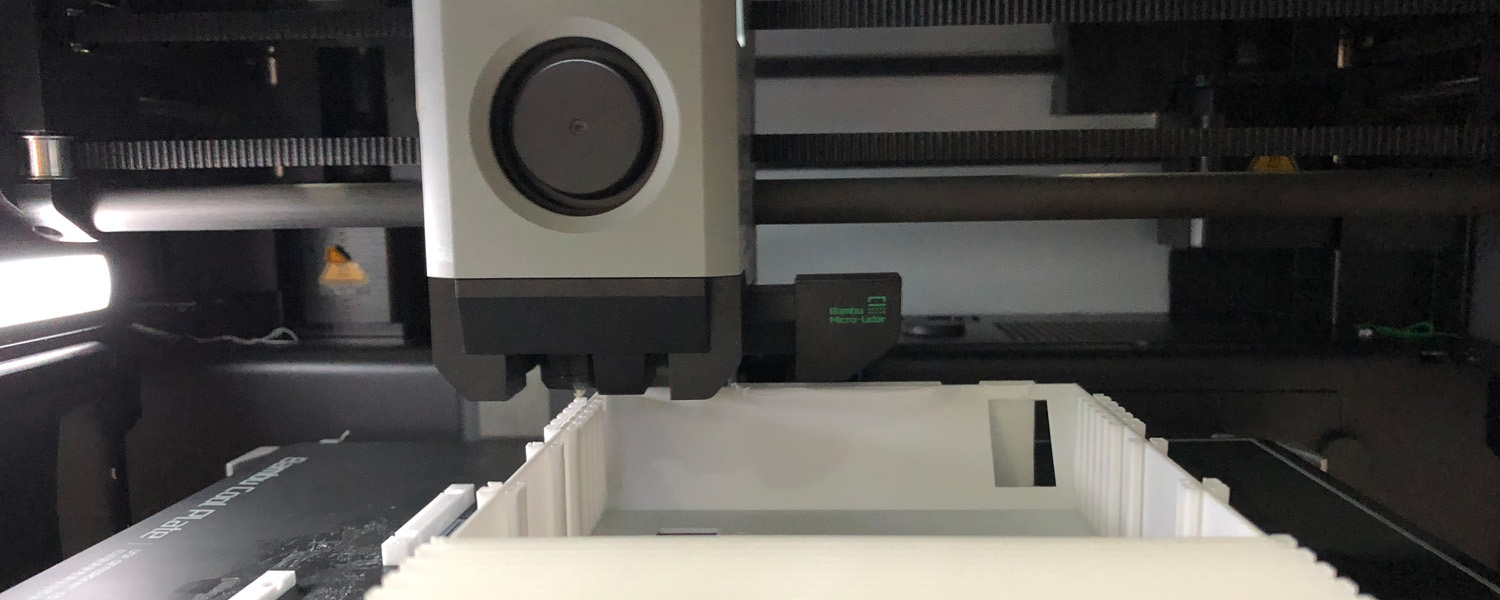
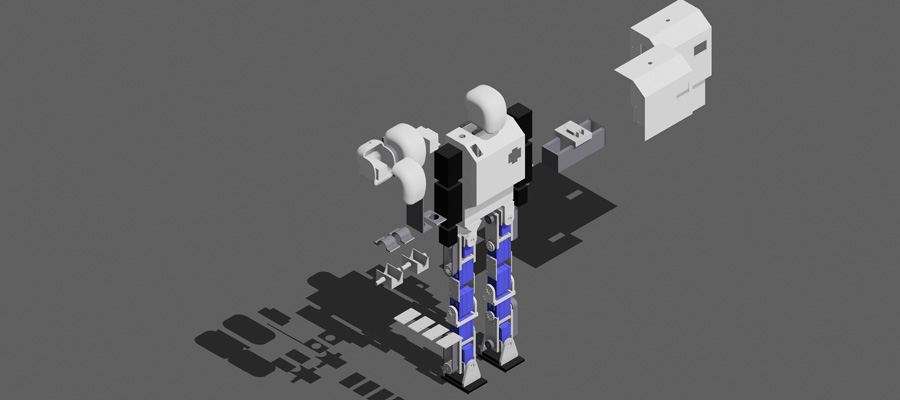
ロボットの構造は授業やアルバイトで鍛えた3D-CADで設計し、頭部、胸部、腕部、腰部、脚部、足底の6つの要素で構成されるロボットの各部品を3Dプリンタで製作しました。脚部は片足6関節、両足で計12関節と複雑な構造に挑戦し、足底には床との接地を感知するセンサー、腰にはロボットの姿勢を感知するジャイロセンサーを取り付け、制御する設計でした。「設計製図」「ロボット工学」といった授業で学んだ知識・スキルが役立ちましたが、初期設計ではロボットの重心が高すぎて直立できずに転倒し、3Dプリンタでは熱による膨張・収縮で制作部品の寸法精度に誤差が生じる問題が発生。重心は胸部からジャイロセンサーがある腰に変更し、寸法誤差は組み立てに影響しない部品形状に調整することで解決しました。また、歩行制御では歩行の安定性を向上させるため、初期は倒立振子の制御方法を参考にロボットの重心や姿勢を制御していましたが、足先のセンサーから床反力を測定し、ロボットの慣性力を計算に入れることでロボットが転倒せずに約2m歩行することができました。
プロジェクトリサーチによって、思い描いていたロボットを制作することが出来てとてもうれしかったです。失敗も今しかできないことだと前向きに捉え、試行錯誤を積み重ねた結果、活動に対して「滋賀県中小企業団体中央会会長賞」をいただき、達成感も得ることが出来ました。今回の活動で機械設計の知識は増えましたが、制御の知識が足りないと感じたため、現在は渋谷研究室にてロボットのモータを効率的かつ滑らかに動かす制御の勉強に力を入れています。卒業研究では四足走行ロボットの軽量化に取り組み、その後も大学院でロボットの研究開発を続けます。プロジェクトリサーチでの学び、経験を糧に研究に取り組みたいと考えています。
